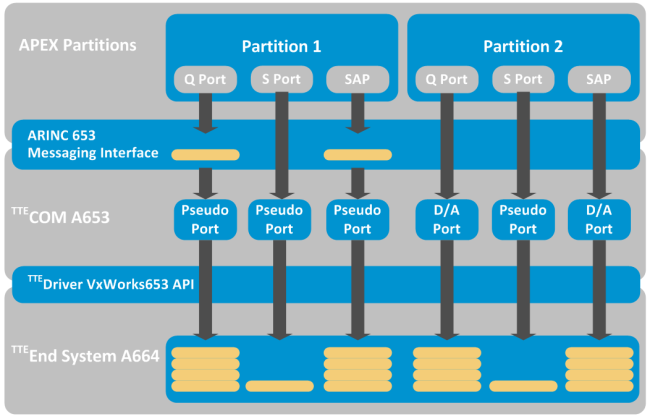
The TTECOM A653 integrated in Wind River's robust operating system VxWorks 653 for controlling ARINC 653 IMA systems offers a powerful interface to applications running on TTEthernet®-based networks. TTEthernet network technology enables high-bandwidth deterministic high-integrity real-time communication. Time-triggered, rate-constrained (ARINC 664 part 7), and COTS Ethernet traffic are integrated and flow within one physical infrastructure.
TTECOM A653 brings robust partitioning among the different traffic classes from the network layer up to the ARINC 653 operating system level. It handles the initialization and configuration of the TTEthernet end-system and services over sampling- and queuing ports. The TTECOM A653 provides a ready to go, COTS solution with full TTEthernet tools support.